

Rosenblatt感知器
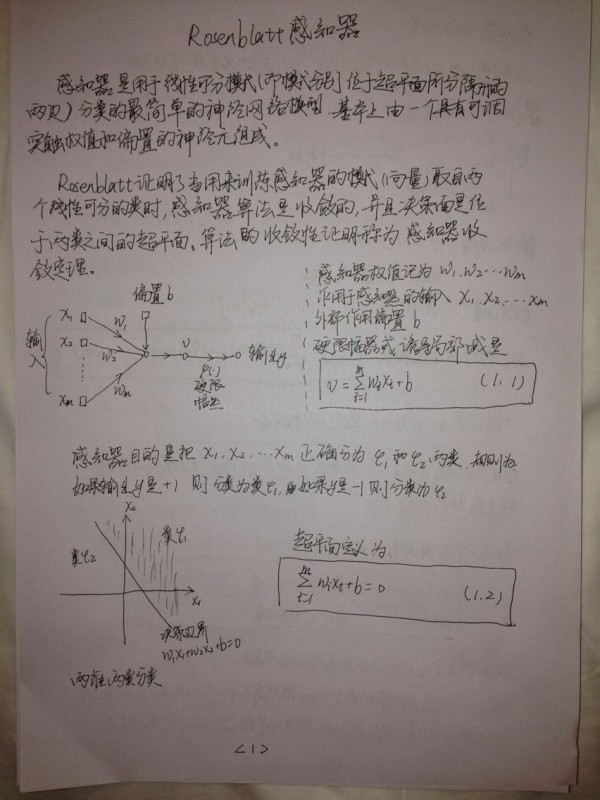
感知器是用于线性可分模式(模式分别位于超平面两边)分类的最简单的神经网络模型,基本上由1个具有可调突触权值和偏置的神经元组成。
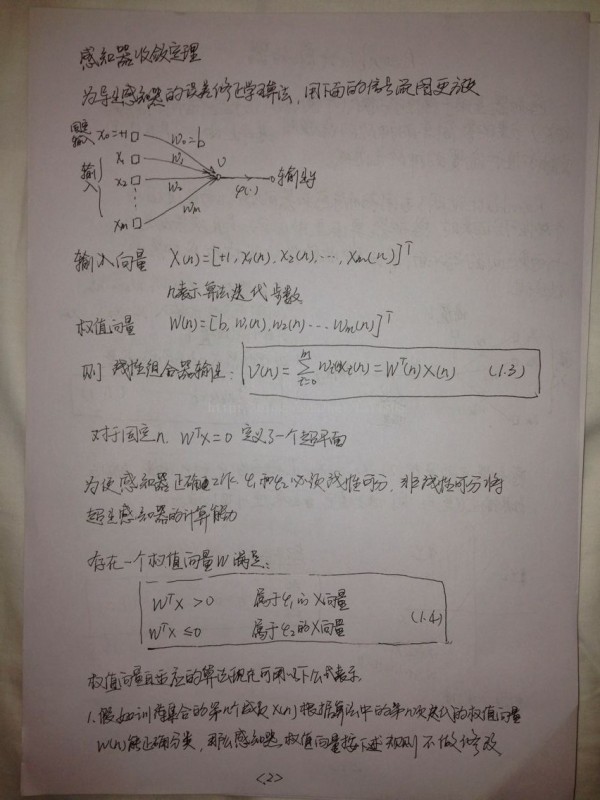
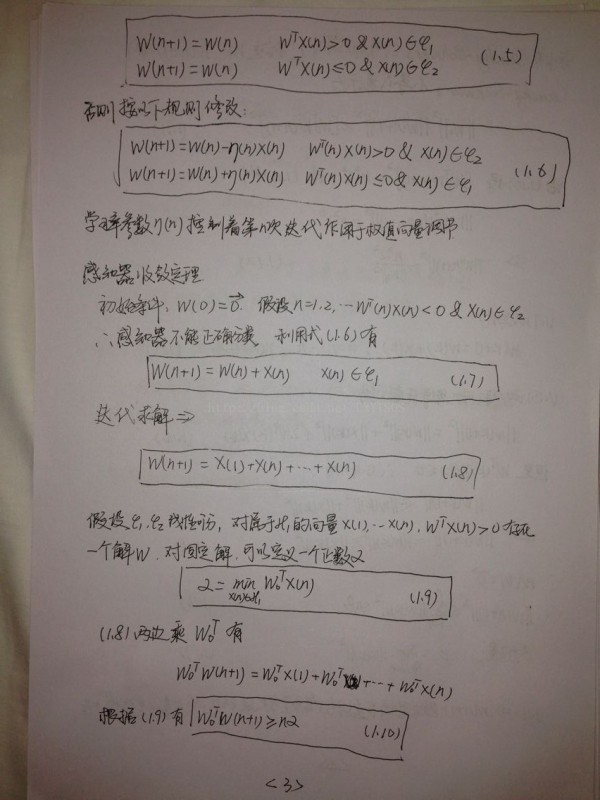
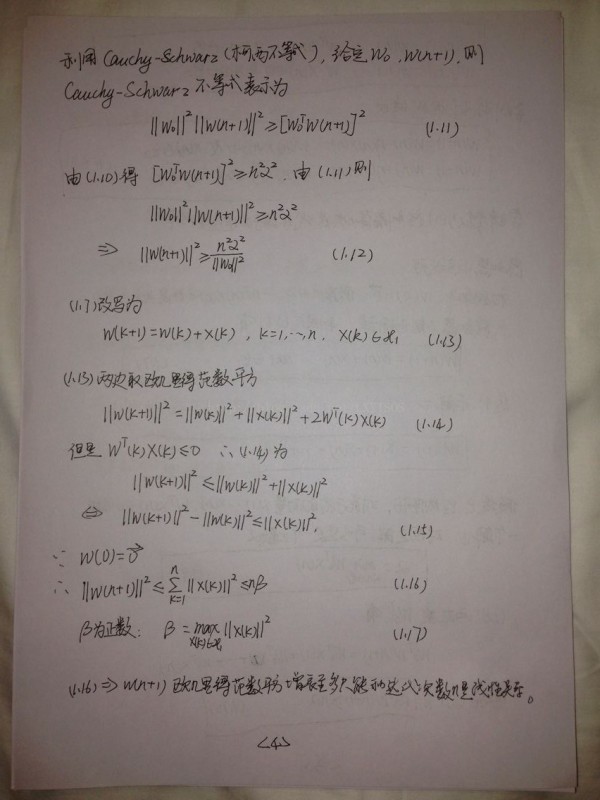
Rosenblatt证明了当用来训练感知器的模式(向量)取自两个线性可分的类时,感知器算法是收敛的,并且决策面是位于两类之间的超平面。算法的收敛性称为感知器收敛定理。

上一篇 VC++信息安全编程(13)Windows2000/xp/vista/7磁盘扇区读写技术
下一篇 java.lang.IllegalStateException: File has been moved - cannot be read again
程序员人生,我编程,我富裕,记住wfuyu网,php教程,php学习,php手册,CMS模版制作
声明:本站大部分内容是作者原创,少部分收集于互联网供大家一起学习,原版权很多不明,如有侵权请联系本站,谢谢!
粤ICP备14040726号-1 2015-2020 程序员人生 版权所有


