数字集成电路设计-12-状态机的四种写法
来源:程序员人生 发布时间:2014-09-29 23:35:29 阅读次数:3465次
引言
在实际的数字电路设计中,状态机是最常用的逻辑,而且往往是全部逻辑的核心部分,所以状态机的质量,会在比较大的程度上影响整个电路的质量。
本小节我们通过一个简单的例子(三进制脉动计数器)来说明一下状态机的4中写法。
1,模块功能
由于我们的目的在于说明状态机的写作方式,所以其逻辑越简单有利于理解。就是一个简单的脉动计数器,每个三个使能信号输出一个标示信号。
2,一段式
状态机的写法,一般有四种,即一段式,两段式,三段式,四段式。对于一段式的写法,整个状态机的状态转移、转移条件、对应状态的输出都写在一个always块里,故称‘一段式’。那么,脉动计数器状态机的一段式写法该怎么写呢?如下所示:
/*
* file : fsm1.v
* author: Rill
* date : 2014-05-11
*/
module Mfsm1
(
clk,
rst,
enable,
done
);
input wire clk;
input wire rst;
input wire enable;
output reg done;
parameter s_idle = 4'd0;
parameter s_1 = 4'd1;
parameter s_2 = 4'd2;
parameter s_3 = 4'd3;
reg [3:0] state;
always @(posedge clk)
begin
if(rst)
begin
done <=1'b0;
state <= s_idle;
end
else
begin
case(state)
s_idle:
begin
if(enable)
state <= s_1;
done <= 1'b0;
end
s_1:
begin
if(enable)
state <= s_2;
done <= 1'b0;
end
s_2:
begin
if(enable)
begin
state <= s_3;
done <= 1'b1;
end
else
begin
done <= 1'b0;
end
end
s_3:
begin
state <= s_idle;
done <= 1'b0;
end
default:
begin
state <= s_idle;
done <= 1'b0;
end
endcase
end
end
endmodule
3,两段式
状态机的另外一种写法是‘两段式’的。两段式的写法,整个状态机由两个always块组成,第一个块只负责状态转移,第二个块负责转移条件和对应状态的输出。其中第一个块是时序逻辑,第二个块是组合逻辑。脉动计数器状态机的两段式写法又是怎样的呢?
/*
* file : fsm2.v
* author: Rill
* date : 2014-05-11
*/
module Mfsm2
(
clk,
rst,
enable,
done
);
input wire clk;
input wire rst;
input wire enable;
output reg done;
parameter s_idle = 4'd0;
parameter s_1 = 4'd1;
parameter s_2 = 4'd2;
parameter s_3 = 4'd3;
reg [3:0] current_state;
reg [3:0] next_state;
always @(posedge clk)
begin
if(rst)
begin
current_state <= s_idle;
end
else
begin
current_state <= next_state;
end
end
always @(*)
begin
case(current_state)
s_idle:
begin
if(enable)
next_state = s_1;
done = 1'b0;
end
s_1:
begin
if(enable)
next_state = s_2;
done = 1'b0;
end
s_2:
begin
if(enable)
next_state = s_3;
done = 1'b0;
end
s_3:
begin
next_state = s_idle;
done = 1'b1;
end
default:
begin
next_state = s_idle;
done = 1'b0;
end
endcase
end
endmodule
4,三段式
从上面可以看出,两段式的写法是从一段式发展而来的,将一段式的写法中将状态转移部分提取出来,作为一个独立的always块,就变成了两段式。按照这个思路继续推进,如果将两段式的第二个块中的转移条件提取出来,也作为一个独立的块,就变成了‘三段式’,三段式的写法中,状态转移块是时序逻辑,转移条件块是组合逻辑,对应状态的输出是时序逻辑。那么,脉动计数器状态机的三段式写法是怎样的呢?
/*
* file : fsm3.v
* author: Rill
* date : 2014-05-11
*/
module Mfsm3
(
clk,
rst,
enable,
done
);
input wire clk;
input wire rst;
input wire enable;
output reg done;
parameter s_idle = 4'd0;
parameter s_1 = 4'd1;
parameter s_2 = 4'd2;
parameter s_3 = 4'd3;
reg [3:0] current_state;
reg [3:0] next_state;
always @(posedge clk)
begin
if(rst)
begin
current_state <= s_idle;
end
else
begin
current_state <= next_state;
end
end
always @(*)
begin
case(current_state)
s_idle:
begin
if(enable)
next_state = s_1;
end
s_1:
begin
if(enable)
next_state = s_2;
end
s_2:
begin
if(enable)
next_state = s_3;
end
s_3:
begin
next_state = s_idle;
end
default:
begin
next_state = s_idle;
end
endcase
end
always @(posedge clk)
begin
if(rst)
begin
done <= 1'b0;
end
else
begin
case(next_state)
s_idle:
begin
done <= 1'b0;
end
s_1:
begin
done <= 1'b0;
end
s_2:
begin
done <= 1'b0;
end
s_3:
begin
done <= 1'b1;
end
default:
begin
done <= 1'b0;
end
endcase
end
end
endmodule
5,四段式
上面的三种状态机的写法是我们经常提到的,也是经典的三种。这三种写法在逻辑上是完全等价的,也就是是说,无论采用哪种写法,模块的功能都是一样的,但前两种一般只出现在教科书中,在实际的项目中是很少见到的。原因在于生成网表的综合器,由于目前的综合器还不够智能,其优化算法对三种写法的敏感度不同,造成最终生成的电路有所区别,有时候区别较大,尤其是对于复杂的状态机。无数血与泪的实践证明,使用前面两种写法生成的电路在时序、性能、功耗和面积等方面的表现都不如三段式的写法,所以即使三段式的写法会让你多敲几次键盘,在实际的电路设计中尽量采用三段式的写法来描述状态机,多敲的那几次键盘换来的电路质量的提高是完全值得的。
俗话说,“没有最好,只有更好”。三段式的写法是不是最好的呢?我认为不见得如此。上面说到,如果采用三段式的写法,代码会变长,如果是大的状态机,结果会更明显。那么,有没有一种写法,既能产生优质的电路,又能少敲几次键盘呢?答案是肯定的。
仔细观察上面三种写法,你会发现,无论是哪种写法,都会使用case语句,case语句不仅占用的代码行数最多,而且综合器对case语句还有不同的解析(full case和parallel case),如果我们将三段式的写法中的case语句换成assign语句,并将状态转移块进一步将当前状态和下一个状态拆分开,就变成了“四段式”,四段式的写法由状态识别,状态转移,转移条件和对应状态的输出四部分组成。那么,脉动计数器状态机四段式的写法又是如何实现的呢?
/*
* file : fsm4.v
* author: Rill
* date : 2014-05-11
*/
module Mfsm4
(
clk,
rst,
enable,
done
);
input wire clk;
input wire rst;
input wire enable;
output done;
parameter s_idle = 4'd0;
parameter s_1 = 4'd1;
parameter s_2 = 4'd2;
parameter s_3 = 4'd3;
reg [3:0] current_state;
wire c_idle = (current_state == s_idle);
wire c_1 = (current_state == s_1);
wire c_2 = (current_state == s_2);
wire c_3 = (current_state == s_3);
wire n_idle = c_3;
wire n_1 = c_idle & enable;
wire n_2 = c_1 & enable;
wire n_3 = c_2 & enable;
wire [3:0] next_state = {4{n_idle}} & s_idle |
{4{n_1}} & s_1 |
{4{n_2}} & s_2 |
{4{n_3}} & s_3;
always @(posedge clk)
begin
if(rst)
current_state <= s_idle;
else if(n_idle | n_1 | n_2 | n_3)
current_state = next_state;
end
assign done = c_3;
endmodule
6,验证
通过对比,我们很容易就会发现,采用四段式写法写出来的状态机,代码数量会减少很多,不仅如此,由于使用的语句类型减少了(只有赋值语句),生成电路的质量也会有所改善。那是否在进行电路设计的时候采用四段式的写法就没有缺点了呢?还有句俗话叫“金无足赤,人无完人”,由于四段式的写法将状态机拆分的过于零散,以至于综合器都识别不出来它是一个状态机了,所以在做覆盖率(coverage)分析的时候,分析工具只会按一般的逻辑进行分析,各个状态之间的转换概率就分析不出来了。
既然状态机有这么多种写法,在实际工作中采用哪一种呢?我认为三段式和四段式都是可以接受的(我个人习惯四段式的写法)。如果将来有一天综合器对四种写法综合出来的电路都差不多,那读者就可以根据自己的喜好来任意选择了。
上面提到,无论采用哪种写法,模块实现的功能都是完全相同的,倒底是不是呢?我们需要写一个简单的测试激励(testbench)来验证一下。
/*
* file : tb.v
* author: Rill
* date : 2014-05-11
*/
module tb;
reg clk;
reg rst;
reg enable;
wire done1;
wire done2;
wire done3;
wire done4;
Mfsm1 fsm1
(
.clk(clk),
.rst (rst),
.enable(enable),
.done(done1)
);
Mfsm2 fsm2
(
.clk(clk),
.rst (rst),
.enable(enable),
.done(done2)
);
Mfsm3 fsm3
(
.clk(clk),
.rst (rst),
.enable(enable),
.done(done3)
);
Mfsm4 fsm4
(
.clk(clk),
.rst (rst),
.enable(enable),
.done(done4)
);
always #1 clk = ~clk;
integer loop;
initial
begin
clk = 0;
rst = 0;
enable = 0;
loop = 0;
repeat (10) @(posedge clk);
rst = 1;
repeat (4) @(posedge clk);
rst = 0;
repeat (100) @(posedge clk);
for(loop=1;loop<10;loop=loop+1)
begin
enable = 1;
@(posedge clk);
enable = 0;
@(posedge clk);
end
repeat (100) @(posedge clk);
$stop;
end
endmodule
7,modelsim下的波形
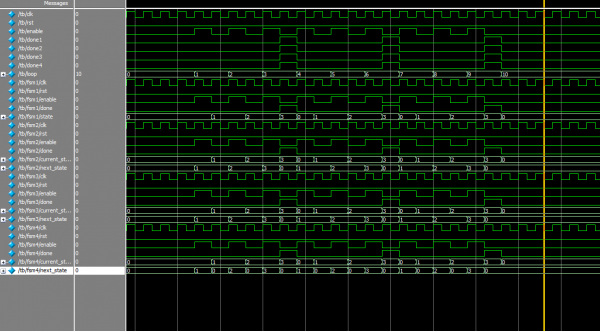
8,ncsim的波形
上面是用windows下的modelsim得到的仿真波形,如果我们用ncsim(IUS),并且在Linux下,我们最好写一个简单的脚本来进行仿真,提高工作效率。
#! /bin/bash
#
# fsm.sh
# usage: ./fsm.sh c/w/r
# Rill create 2014-09-03
#
TOP_MODULE=tb
tcl_file=run.tcl
if [ $# != 1 ];then
echo "args must be c/w/r"
exit 0
fi
if [ $1 == "c" ]; then
echo "compile lib..."
ncvlog -f ./vflist -sv -update -LINEDEBUG;
ncelab -delay_mode zero -access +rwc -timescale 1ns/10ps ${TOP_MODULE}
exit 0
fi
if [ -e ${tcl_file} ];then
rm ${tcl_file} -f
fi
touch ${tcl_file}
if [ $1 == "w" ];then
echo "open wave..."
echo "database -open waves -into waves.shm -default;" >> ${tcl_file}
echo "probe -shm -variable -all -depth all;" >> ${tcl_file}
echo "run" >> ${tcl_file}
echo "exit" >> ${tcl_file}
fi
if [ $1 == "w" -o $1 == "r" ];then
echo "sim start..."
ncsim ${TOP_MODULE} -input ${tcl_file}
fi
echo "$(date) sim done!"
运行脚本:
./fsm.sh c
./fsm.sh w
执行:
simvision wave/wave.trn
即可得到仿真波形,如下所示:
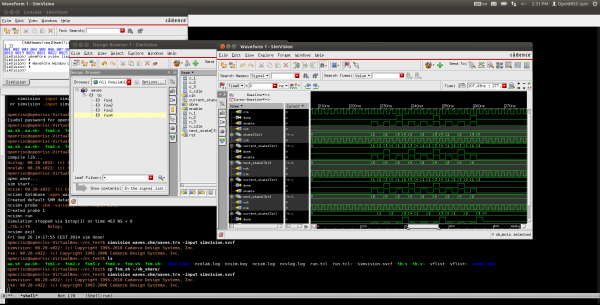
从中可以看出,ncsim和modelsim得到的仿真波形有所不同。
生活不易,码农辛苦
如果您觉得本网站对您的学习有所帮助,可以手机扫描二维码进行捐赠





