

7月19日 - 20日高德携手CSDN共同举办的“高德LBS智能硬件编程马拉松”在深圳3W咖啡成功举办。本次大赛得到了土曼、凌拓科技、亿航的硬件支持,并邀请到了来自高德、Seeed Studio和Mixtile的嘉宾共同参与评选。经过两天一夜的持续奋战,云雀科技脱颖而出,斩获大赛一等奖。他们不仅分享了开发过程,还聊起了对于地图与飞行器可结合的发展方向。

云雀科技
云雀科技展示的作品是基于四轴飞行器的硬件平台,最与众不同之处就是他们开发了一款支持全彩显示的遥控器。遥控器基于Android系统,可以实时接收飞行器拍摄到的视频数据,以及航点、高度、速度等信息。经过两天的开发,他们将高德开放平台的API集成到了遥控器中,可以实时跟踪飞行器的位置,并显示一些航行信息。同时,飞行器在飞行过程中,还能将航点数据上传并保存在手持终端里,利用高德云图服务,用户可以随时在平板或云图平台上看到飞行的航点数据,甚至进行分享。
高德地图Android API+高德云图
他们的作品用到了两项高德LBS开放平台的产品:Android API和云图。Android API为这款产品提供了GPS定位、自定义导航界面等信息资源,让产品具备定位飞行器,实时获取位置信息的能力。目前全彩可视遥控器上已经显示出包括速度、高度、GPS信息、经纬度,还有飞机在飞行过程中所处的位置、航向角度等数据。

飞行器与全彩可视遥控器
从这款设备本身来讲,它有两大特点:一是集成了全彩的HUD显示,二是支持最远达10公里的远程遥控。其实,云雀科技本身是FPV飞行器解决方案供应商,目前可以提供包含视频叠加(OSD)系统、自动天线跟踪、飞行姿态与控制、高精度抗干扰GPS等十余款产品,遥控器只是其中一款。他们在与一些客户的接触过程中发现,大多数客户都提出了实时航点和轨迹数据的需求。而云图对于这款产品来说,就是一个最合适的解决方案。

飞行器在航行过程中,会讲航点数据从飞行器实时传输到遥控器上,当飞行结束后,遥控器可以将数据上传至高德云图,从而达到实时共享飞行航点信息的目的。同时,利用云图的数据展示能力,渲染后还能进行位置信息的展示。如下图所示,云雀科技在比赛期间,进行了测试,通过模拟GPS采集了大约1200个航点数据,在上传至云图后,完整地展示了出来。
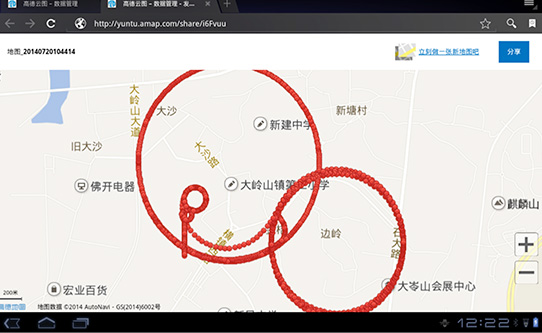
在云图中所显示的飞行轨迹
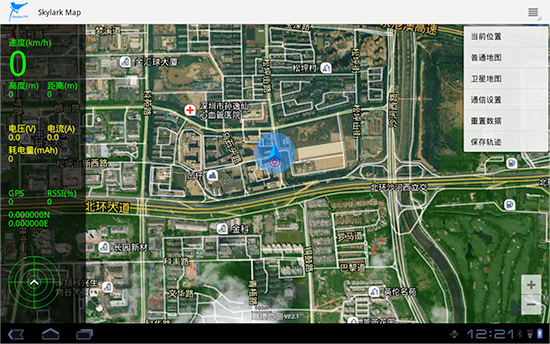
基于高德地图API的应用界面
赛后,云雀科技参赛成员田文生表示,高德地图AndroidAPI已经非常成熟,不过云图还是个比较新的产品。但他们在使用过程中发现,对于较大的航点数据来说,上传速度还不够理想。
未来展望
云雀科技从飞行器领域,他们认为无人机与LBS应用的结合是非常符合市场需求的。首先使用者需要看到飞行器实时的飞行位置,这就需要地图与之结合。另一方面,如果从“无人机”的名字来考虑,它本身就应该要达到无人操控,所以就产生了“航线规划”和“航机设置”的功能需求,而这两点也都是无法脱离于地图存在的。
云雀科技除了研发飞行器、远程遥控系统等,他们还为一些客户提供航拍服务。他们表示,现在考虑最多的方案就是将航拍与地图的结合。
众所周知,现在很多地图都支持3D街景功能,如果将航拍与3D街景结合会是怎样一番景象呢?想象一下,当你走到一个景点,打开地图,你可以看到3D的街景图像,同时还可以浏览由飞行器实时航拍的视频,你所能了解到的不再是简单的图像信息,而是更加生动的景象。再想象一下,当你看航拍视频时,还可以同时在视频窗口旁看到飞行器的运动轨迹,可以清楚的了解到正在看的实时视频是在什么位置拍摄的。总之,不论是以上哪种结合方式,这对于用户来讲都是一种前所未有的革新体验。
未来,使用无人机的企业会更多,而且很多企业可能拥有不止一架无人机,这酒会涉及到无人机的轨迹管理问题。企业需要通过应用设定管理多架无人机的航线,在这之中就需要结合LBS的能力才能实现。很多飞行作业一般都是外场操作人员将飞行器带出去,然后由中心指挥人员绘制好飞行轨迹,同时管理这些飞行器的路径。而他们完全可以将飞行轨迹上传至云图,然后下载传输至飞行器中,由飞行器自动完成一些飞行作业。
本届高德LBS智能硬件编程马拉松是“2014高德LBS应用大赛”的一个环节,参与智能硬件编程马拉松的作品也可同时报名参与LBS应用大赛,与更多团队角逐价值328万的最终大奖。

程序员人生,我编程,我富裕,记住wfuyu网,php教程,php学习,php手册,CMS模版制作
声明:本站大部分内容是作者原创,少部分收集于互联网供大家一起学习,原版权很多不明,如有侵权请联系本站,谢谢!
粤ICP备14040726号-1 2015-2020 程序员人生 版权所有


